Il laboratorio ha come obiettivi lo studio, il progetto e la realizzazione di sistemi robotici innovativi. In particolare vengono considerati strutture e sistemi di attuazione e trasmissione non convenzionali, destinati a soddisfare specifiche particolari in termini di funzionalità, prestazioni dinamiche, spazi di lavoro, ecc.
|
|
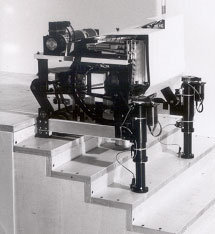
A.St.Ro.
(Autonomous Stair-Climbing Robot)
Carlo Ferraresi;Giuseppe Quaglia
Robot a locomozione ibrida (ruote e zampe) concepito per la mobilità in ambienti semi-strutturati.
E’ possibile il moto su scale o rampe mantenendo il corpo in assetto costante
|
|
|
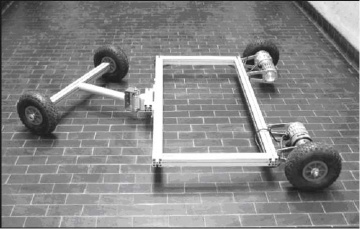
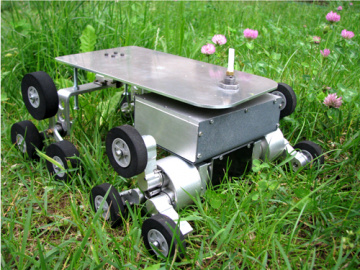
Veicolo autonomo per applicazioni di Geofisica
Carlo Ferraresi;Giuseppe Quaglia
Struttura leggera adatta al moto su superfici moderatamente sconnesse, con ampie capacità di manovra.
Predisposto per l’installazione di antenna per ispezioni geofisiche del terreno.
|
|
|
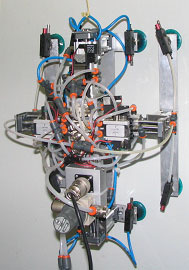
Winclimb Robot
Guido Belforte; Roberto Grassi; Giuliana Mattiazzo; Carmen Visconte
Robot pneumatico concepito per muoversi lungo superfici lisce verticali grazie all’utilizzo di ventose.
|
|

|
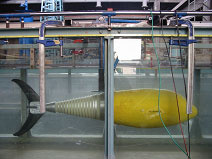
Robot subacqueo
Carlo Ferraresi; Massimiliana Carello; Andrea Manuello Bertetto
Propulsione a pinna oscillante.
Attuazione tramite attuatore deformabile a fluido.
|
|
Epi.Q
Walter Franco; Daniela Maffiodo; Giuseppe Quaglia;
Riccardo Oderio
Piccolo robot mobile capace di muoversi su ogni terreno, superare ostacoli e salire le scale.
In grado di modificare passivamente il suo modo di funzionamento a seconda del tipo di terreno e delle condizioni dinamiche, dal rotolamento alla camminata.
|
|
|
|
Wi Mas-3
Carlo Ferraresi; Stefano Pastorelli; Francesco Pescarmona
Master aptico a 2 gradi di libertà, per telemanipolazione con riflessione di forza.
Attuazione elettrica, trasmissione a cordini.
|
|
|
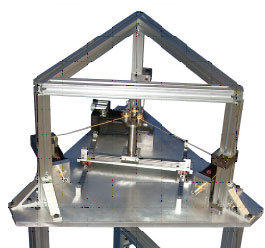
WiRo-6.3
Carlo Ferraresi; Stefano Pastorelli; Francesco Pescarmona
Master aptico a 6 gradi di libertà, per telemanipolazione con riflessione di forza.
Attuazione elettrica, trasmissione a cordini, struttura parallela multiridondante.

|
|
|
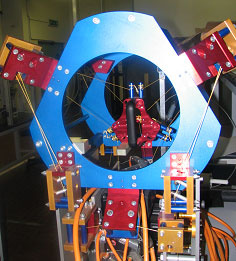
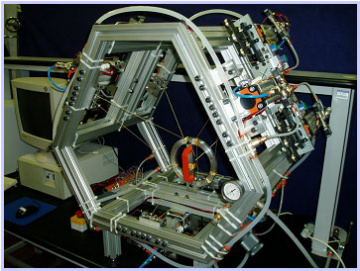
PneuMas-6.3
Massimiliana Carello; Carlo Ferraresi; Roberto Grassi; Francesco Pescarmona
Master aptico a 6 gradi di libertà, per telemanipolazione con riflessione di forza.
Attuazione pneumatica, trasmissione a cordini, struttura parallela multiridondante.
|
|
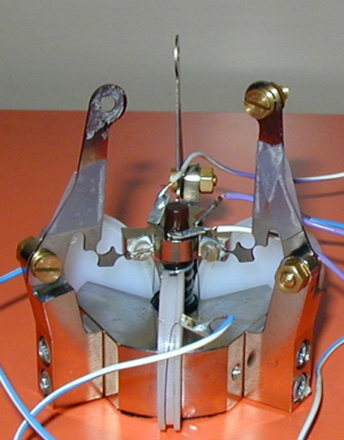
Mano a dita flessibili
Massimiliana Carello; Carlo Ferraresi; Carmen Visconte
Tre dita ad attuazione pneumatica, dotate di buona adattabilità nella presa di frutti di varia forma e dimensioni, consentono di distribuire con buona uniformità la forza esercitata sulla superficie di contatto
|
|

|
|
|
Mano di presa a tre dita con cerniere virtuali
Guido Belforte; Daniela Maffiodo; Terenziano Raparelli
Di piccole dimensioni (le dita misurano circa 30 X 30 mm), può afferrare e trasportare piccoli oggetti a simmetria cilindrica.
Attuato mediante fili a memoria di forma (SMA) per sviluppare notevoli forze e piccoli spostamenti.
|
|
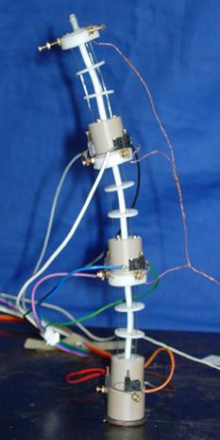
Dito flessibile attuato mediante fili SMA
Guido Belforte; Daniela Maffiodo; Terenziano Raparelli
|
A struttura modulare, ogni dito è realizzato mediante tre moduli cilindrici di piccole dimensioni (16 mm di diametro, 40 mm di lunghezza), attuati ciascuno mediante tre fili SMA disposti assialmente . L’accorciamento di uno o più fili causa la flessione dell’intero modulo
|
|
|
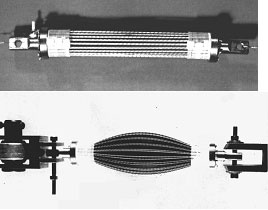
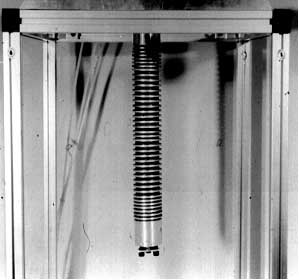
Muscolo pneumatico a fibre diritte
Carlo Ferraresi; Walter Franco; Andrea Manuello Bertetto
E’ un’evoluzione del muscolo di McKibben.
Le fibre disposte longitudinalmente conferiscono prestazioni in forza particolarmente elevate.
|
|
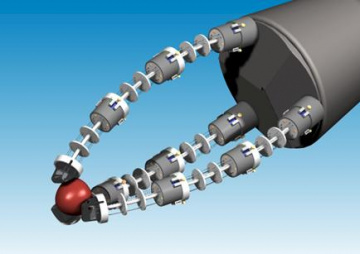
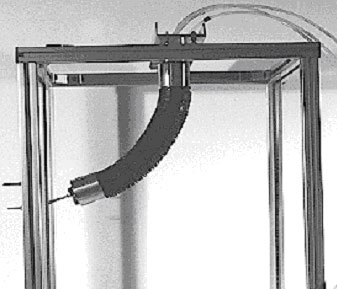
Attuatore a proboscide
Gustavo Belforte, Carlo Ferraresi; Andrea Manuello Bertetto, Francesco Pescarmona
Attuatore deformabile a fluido. La sezione a 2 o 3 lobi consente una deformazione di flessione nel piano o nello spazio controllata dalla pressione interna.
|
|
|
|
|
|
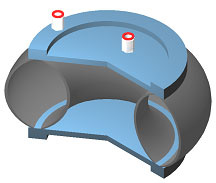
Attuatore deformabile BiFac2
Carlo Ferraresi; Walter Franco; Giuseppe Quaglia
Attuatore deformabile a fluido, in grado di esercitare sia azioni di trazione sia di spinta grazie alla struttura con due membrane coassiali.
|
|
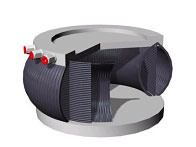
Attuatore deformabile BiFAc3
Carlo Ferraresi; Walter Franco; Giuseppe Quaglia
La struttura a tre membrane consente, rispetto al BiFAc2, una maggiore configurabilità e quindi la possibilità di impiego in applicazioni come il controllo di vibrazioni o lo sviluppo di sospensioni veicolari semiattive.
|
|
|

|
|
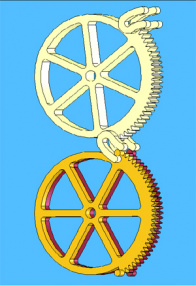
Meccanismo a doppia ruota stellare
Daniela Maffiodo; Francesco Pescarmona; Giuseppe Quaglia
Studiato per applicazioni tessili.
Configurabile secondo le specifiche della legge di moto voluta.
|
|
|
|
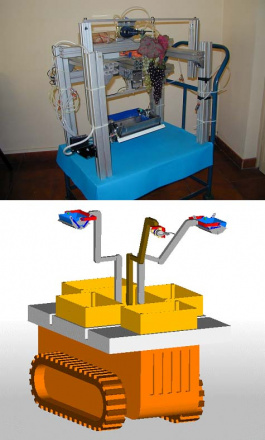
Macchina per la raccolta dell’uva da tavola
Guido Belforte; Gabriella Eula; Terenziano Raparelli
La macchina consiste in una forbice per il taglio del picciolo ed in un vassoio per la raccolta del frutto. La movimentazione è stata realizzata grazie all’ausilio di sensori ottici e di un PLC.
Il vassoio per la raccolta dell’uva può essere montato su di una trattrice con più bracci articolati che permettono una forte riduzione dei tempi ciclo.
Progetto PRIN 2004-06: “Sistemi pneumatici e meccatronici per la coltivazione e la raccolta di prodotti agricoli tradizionali ed a vocazione territoriale”
|