Laboratorio “Fluidica e Robotica soft e di servizio”
Responsabili delle attività di Ricerca: Giuseppe Quaglia e Carmen Visconte
Obiettivi:
Il laboratorio ha come obiettivi lo studio, lo sviluppo e la caratterizzazione sperimentale di dispositivi e sistemi a fluido e di dispositivi per robotica soft. Si elencano di seguito alcuni esempi di attività:
Robotica Soft:
- Sviluppo di attuatori deformabili e bidirezionali (BiSoft.Q)
- Dispositivo aptico afferrabile per telemedicina e realtà virtuale/aumentata (PAL-HAND.Q)
- Polpastrelli sensorizzati per manipolazione di precisione (Soft Touch)
- Dispositivo a rigidezza variabile per la riabilitazione della mano
Fluidica:
- Sviluppo di microgocciolatori
- Sviluppo di micromescolatori statici
- Ugello per l’erogazione di prodotti alimentari ad elevata viscosità
- Caratterizzazione sperimentale della crema sulla superficie del caffè espresso
- Circuito di alimentazione dell’inchiostro e gestione della back-pressure per barre di stampa
I micro-gocciolatori o microdroplet generators sono dispositivi microfluidici utilizzati in diversi processi chimici, alimentari, farmaceutici, biomedici, ecc. per le tecnologie innovative di micro-incapsulamento e di emulsione. Sono elementi basilari nei sistemi di microfluidica digitale fondati su microgocce.
Esempi di applicazione: aerazione ed emulsione dei cibi, chiarificazione dei vini con metodo di flottazione, micro-ossigenazione (-ossidazione) dei vini, ecc.
Sono stati progettati e studiati originali micro-gocciolatori basati sul principio del micro-focusing e sulla base dei micro-miscelatori statici.
| H-Mixer Water in Silicon Oil: |
|
| Air in Silicone Oil: |
|
Sviluppo di micromiscelatori statici
Sono dispositivi che permettono il miscelamento, essenzialmente per diffusione, di due fluidi distinti, in condizioni di flusso laminare. Sono di interesse per tutti quei processi biologici e chimici che richiedono il miscelamento di campioni e reagenti e nell’industria alimentare.
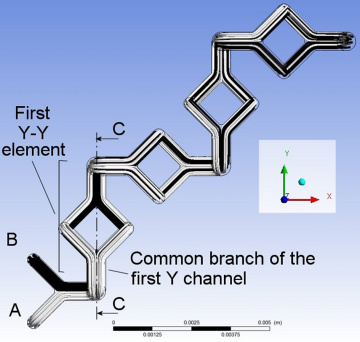
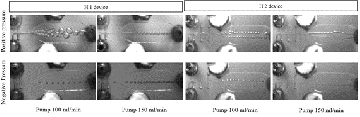
Sono state proposte geometrie di micro-miscelatori privi di parti mobili in grado di ridurre il tempo di miscelamento, oltre che la caduta di pressione imposta, rispetto a dispositivi standard. Lo studio è stato effettuato mediante sviluppo di modelli numerici CFD e analisi sperimentale.
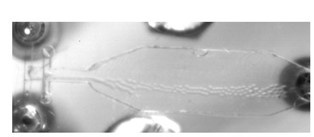
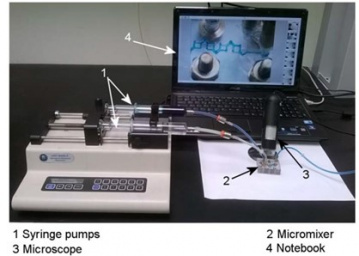
Banco prova
Micro-miscelatori di tipo Chain, Tear-drop e H-C
|
|
|
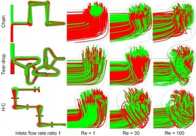

Viktorov Vladimir, Mahmud Md Readul, Visconte Carmen, “Design and characterization of a new H-C passive micromixer up to Reynolds number 100”, Chemical Engineering Research and Design, 108, (2016), pp. 152-163.
Micro-miscelatore di tipo Y-Y
|
|
Viktorov Vladimir, Visconte Carmen, Mahmud Md Readul, “Analysis of a Novel Y-Y Micromixer for Mixing at a Wide Range of Reynolds Numbers”, JOURNAL OF FLUIDS ENGINEERING, 138:9, (2016). |