The laboratory is devoted to the study, development and realisation of innovative robotic systems, in particular as regards non-conventional structures and actuation systems, aimed at achieving defined functionality, dynamic performance, workspace, etc.
|
|
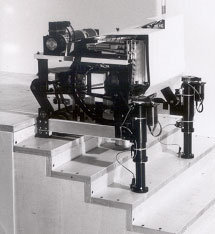
A.St.Ro.
(Autonomous Stair-Climbing Robot)
Carlo Ferraresi; Giuseppe Quaglia
Hybrid locomotion robot (wheels and legs) conceived for mobility in semi-structured environment.
It can move on stairs or slopes maintaining constant body attitude.
|
|
|
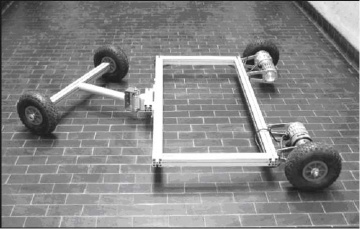
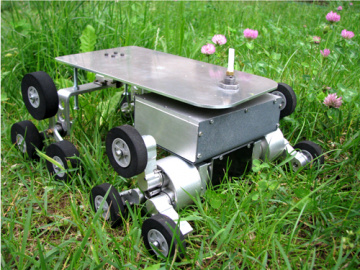
Autonomous vehicle for geophysical inspections
Carlo Ferraresi; Giuseppe Quaglia
Light structure, fit for motion on slightly rough surfaces, with great manoeuvre capability.
Predisposed for holding an antenna for geophysical inspection.
|
|
|
Winclimb Robot
Guido Belforte; Roberto Grassi; Giuliana Mattiazzo; Carmen Visconte
Pneumatic robot conceived for motion on smooth vertical surfaces, thanks to the use of suction cups.
|
|

|
Underwater bio-mimetic robot
Carlo Ferraresi; Massimiliana Carello; Andrea Manuello Bertetto
Propulsion by oscillating fin.
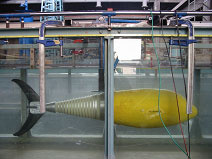
Actuation by fluid
deformable actuator.
|
|
Epi.Q
Walter Franco; Daniela Maffiodo; Giuseppe Quaglia;
Riccardo Oderio
Small mobile robot able to move on and off road, to climb obstacles and to go up stairs.
It passively changes functioning mode according to ground and dynamic conditions, from rolling on wheels to stepping on legs.
ezembed
|
|
|
|
Wi Mas-3
Carlo Ferraresi; Stefano Pastorelli; Francesco Pescarmona
2 d.o.f. haptic master, for teleoperation with force reflection.
Electrical actuation, mechanical transmission by wires.
|
|
|
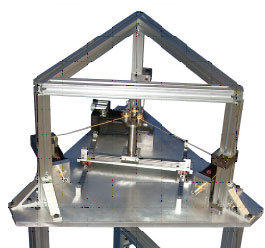
WiRo-6.3
Carlo Ferraresi; Stefano Pastorelli; Francesco Pescarmona
6 d.o.f. haptic master, for teleoperation with force reflection.

Electrical actuation,
mechanical
transmission by wires,
multi-redundant
parallel structure.
|
|
|
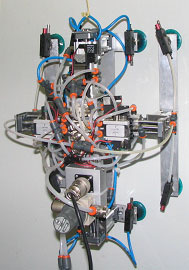
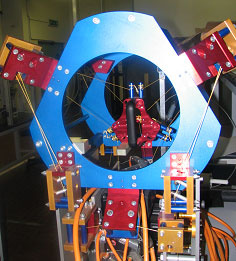
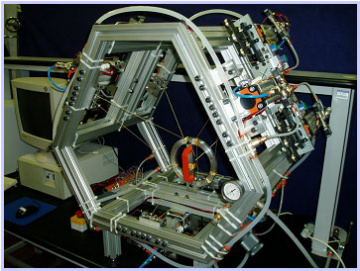
PneuMas-6.3
Massimiliana Carello; Carlo Ferraresi; Roberto Grassi; Francesco Pescarmona
6 d.o.f. haptic master, for teleoperation with force reflection.
Pneumatic actuation, mechanical transmission by wires, multi-redundant parallel structure.
|
|
Hand with flexible fingers
Massimiliana Carello; Carlo Ferraresi; Carmen Visconte
Three pneumatically actuated fingers, having good adaptability in grasping various shape and size fruits, allow a quite uniform force distribution on the contact surface.
|
|

|
|
|
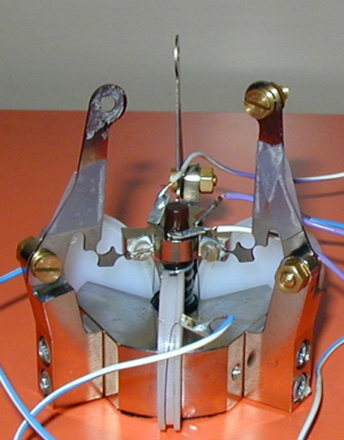
Three-fingered hand with virtual hinges
Guido Belforte; Daniela Maffiodo; Terenziano Raparelli
Having small overall dimensions (fingers of about 30 X 30 mm) to grasp and carry little objects with cylindrical symmetry (e.g. test tubes).
Actuated by SMA wires, developing small displacements but higher forces than other actuators
|
|
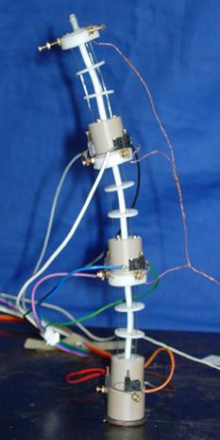
SMA Actuated flexible finger
Guido Belforte; Daniela Maffiodo; Terenziano Raparelli
|
A module has cylindrical shape and small dimensions (diameter of 16 mm, length of 40 mm), with three SMA wires. The body has a central rod and four coaxial discs with holes for the SMA wires, placed at 120°.
The shortening of a SMA wire causes the flexion of the whole module.
|
|
|
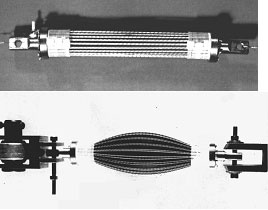
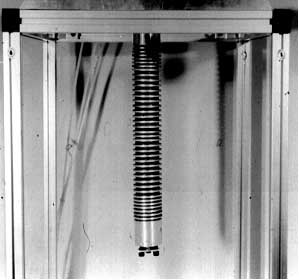
Straight fibres pneumatic muscle
Carlo Ferraresi; Walter Franco; Andrea Manuello Bertetto
An evolution of the McKibben muscle.
The longitudinal orientation of the fibres gives particularly high force performance.
|
|
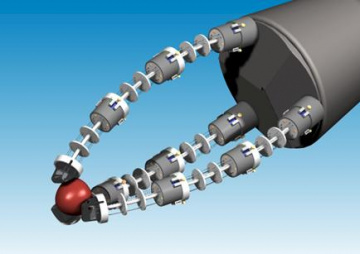
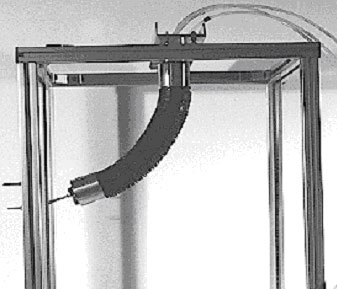
Proboscis actuator
Gustavo Belforte, Carlo Ferraresi; Andrea Manuello Bertetto, Francesco Pescarmona
Deformable fluid actuator. The internal section with 2 or 3 lobes allows bending in plane or space, controllable by the internal pressure.
|
|
|
|
|
|
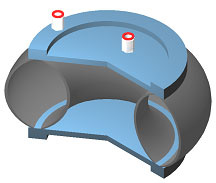
Deformable actuator BiFAc2
Carlo Ferraresi; Walter Franco; Giuseppe Quaglia
Deformable fluid actuator, able to exert both tensile and pulling forces, thanks to its structure with two co-axial membranes.
|
|
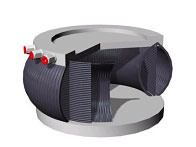
Deformable actuator BiFAc3
Carlo Ferraresi; Walter Franco; Giuseppe Quaglia
Its structure with three membranes allows, with respect to BiFAc2, greater possibility of configuration and, therefore, the use in applications as vibration control or development of vehicular semi-active suspensions.
|
|
|

|
|
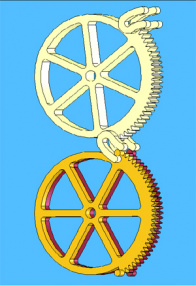
Double star-wheel mechanism
Daniela Maffiodo; Francesco Pescarmona; Giuseppe Quaglia
Developed for textile applications.
A device capable of transforming a uniform rotation motion of two counter-rotating input wheels into a continuous alternate rotation motion with extensive phase of uniform motion.
Configurable according to the desired law of motion.
|
|
|
|
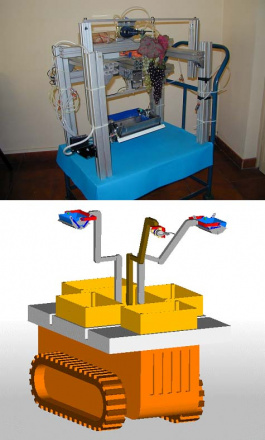
Prototype for harvesting eating grapes
Guido Belforte; Gabriella Eula; Terenziano Raparelli
This device is made up of: shears to cut the fruit stem; a tray to harvest the fruit. The movement of the whole system is obtained by means of a PLC and by some optical sensors.
The tray can be mounted on a tractor with numerous articulated arms to reduce times of harvesting.
National Project PRIN 2004-06: “Pneumatic and mechatronic systems for the growing and the harvesting of traditional and strictly related with specific background agricultural products”
|