Progetto, realizzazione e prove di volo di configurazioni di UAV innovative con propulsione elettro-solare e fuel-cells ad idrogeno
1.1. Heliplat ®: Velivolo non pilotato da alta quota ed elevata autonomia (HALE):
Nel 1995, con il finanziamento dell’Agenzia Spaziale Italiana (ASI), il Dipartimento di Ingegneria Aeronautica e Spaziale del Politecnico di Torino (Responsabile Scientifico Prof. G. Romeo) ha proposto il velivolo UAV ad energia solare HeliPlat® come piattaforma da alta quota a lunghissima autonomia. Il progetto è proseguito nell’ambito di progetti finanziati dall’Unione Europea e, attualmente, è ancora in corso con l’obiettivo di progettare un velivolo del tipo HAVE/UAV (High Altitude Very-long Endurance/ Unmanned Air Vehicle).
l velivolo HeliPlat®(Fig. 1) dovrebbe salire fino ad una quota di 17-20 km sfruttando principalmente la radiazione solare diretta ed in seguito mantenere un volo livellato; durante la notte, verrà invece utilizzato un sistema di immagazzinamento di energia a celle di combustibile. Tutto il Mediterraneo meridionale (dalla Spagna alla Turchia) sarebbe ricoperta con 7-8 di queste piattaforme(Fig. 2),rilevando le imbarcazioni al momento della loro partenza da qualsiasi porto della costa africana e non quando sono già in prossimità della costa italiana.
|
Figura 1 |
Figura 2 |


Lo studio ha messo in luce che l’efficienza e la massa delle celle a combustibile e delle celle solari sono i parametri che maggiormente influenzano le dimensioni della piattaforma. Il peso della struttura è stato minimizzato facendo uso di strutture in materiale composito rinforzati con fibre di carbonio ad elevato modulo elastico (high modulus CFRP).
Per dimostrare la fattibilità di questa configurazione e per validare i modelli di calcolo strutturale sviluppati, sono state condotte prove strutturali statiche e dinamiche su un prototipo in scala ridotta (24m di apertura alare,Fig. 3). Le principali strutture CFRP sono state prodotte da EADS CASA (Spagna), in particolare il longherone principale dell’ala, i longheroni tubolari dell’impennaggio orizzontale, la trave di coda, i longheroni dell’impennaggio verticale ed alcune centine rinforzate. Queste parti sono state assemblate utilizzando giunti speciali, mentre altre parti necessarie per completare l’assemblaggio sono state realizzate dal gruppo di ricerca in collaborazione con la ditta Archemide Composites. Le prove sperimentali, statiche e dinamiche, sono state condotte in due fasi ed i loro risultati hanno mostrato un ottimo accordo con l’analisi teorica e con la simulazione numerica agli elementi finiti. Attualmente il gruppo di ricerca è impegnato nello studio di tematiche mirate al miglioramento delle prestazioni della piattaforma quali
- Ottimizzazione aerodinamica,
- Progetto di soluzioni strutturali innovative
- Valutazione degli effetti della flessibilità del velivolo nell’analisi della dinamica del volo.
- Valutazione del comportamento aero-elastico di ali ad elevato allungamento.
- Verifica del sistema propulsivo (motore elettrico-elica) e della tecnologia delle celle solari.
Nell’ambito del progetto europeo “CAPECON: Civil UAV Applications & Economic Effectivity of Potential Configuration Solutions”, sono state studiate varie configurazioni di velivoli non pilotati da alta quota ed elevata autonomia, sia prendendo in considerazione sistemi di propulsione convenzionali (Modular configuration & Blended configuration), sia una configurazione innovativa ad energia solare chiamata SHAMPO, che viene ritenuta di miglior compromesso tra prestazioni, superficie disponibile per le celle solari e volume disponibile per il carico.
Il programma continuerà per il futuro (con la speranza di ottenere fondi di finanziamento da Enti pubblici o privati) con il progetto e realizzazione di un dimostratore in scala ridotta (circa 40m di apertura alare ) di RPAS ad energia solare, in grado di volere per circa 30 giorni consecutivi a quote di 17 – 20 km, con l’obiettivo di raggiungere il record mondiale di durata.
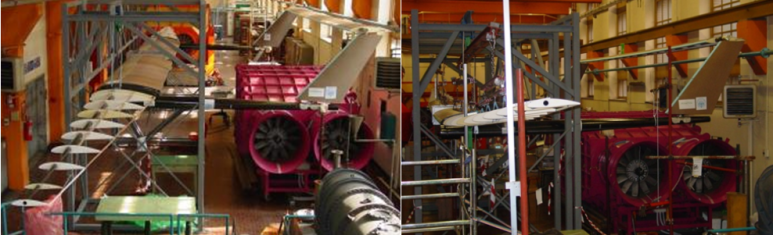
Figura 3
1.2. RAPID-200-FC: Velivolo Elettrico a celle a combustibile ad Idrogeno
Il velivolo ha un sistema propulsivo da 40 kW interamente elettrico: la potenza all’elica è fornita da celle a combustibile ad idrogeno gassoso da 20kW. Per garantire l’assoluta sicurezza delle operazioni di volo l’aeroplano dispone anche di una seconda fonte di energia costituita da un pacco batterie ai polimeri di Litio da 20 kW in grado di garantire potenza supplementare o alternativa durante il decollo e la salita iniziale. L’alimentazione del motore elettrico avviene tramite generazione di corrente ad alto potenziale in un sistema di ionizzazione e ri-combinazione dell’idrogeno (PEM) che ha come prodotto finale 100-110 Amps di corrente elettrica a 200-240 V, più vapori d’aria e acqua emessi a temperatura ambiente. Un’eccezionale e sofisticata elettronica di potenza è stata appositamente sviluppata dalla Ditta Mavel srl per garantire l’erogazione di 40 kW di potenza, necessaria al decollo, riuscendo nel difficile compito di contenere pesi e ingombri. Durante le prove sperimentali è stato collaudato il sistema elettrico di potenza. La velocità di rotazione dell’aereo (84 km/h) è stata raggiunta in appena 184 m di rullaggio ad una potenza di 35 kW. Dopo il decollo, la velocità è stata incrementata fino a valori indicati di 110-120 km/h. È stato quindi effettuato un volo livellato a 400 m di quota ed alla velocità di 135 km/h con la sola potenza sviluppata dalle fuel cells.
Il 26 Maggio 2010 è stato stabilito un nuovo record mondiale di velocità per velivoli a motore di 135 km/h continuativi (quattro passaggi continui su distanza di 3 km – FAI sporting code classe C: aeroplani), con picchi di 145-150 km/h per alcune decine di secondi in volo libero. Inoltre si è avuto un’autonomia di 40 minuti di volo(Fig. 4).In totale si sono svolti 6 voli per circa 3 ore di volo. Il precedente record, stabilito dalla Boeing ma con un moto-aliante (FAI sporting code classe D: moto-alianti), è stato di 120km/h per 20 minuti di volo. Anche la DLR ha effettuato, nel 2009, un volo a fuel cell ma con un moto-aliante.

I buoni risultati ottenuti fanno presupporre che a breve/medio termine sarà possibile utilizzare a bordo di velivoli da trasporto dei sistemi ausiliari alimentati da celle a combustibile ad idrogeno. Il velivolo ed il sistema elettrico ed energetico sono stati sviluppati, su progetto del Prof. Giulio Romeo, e messi a punto dal team di 10 enti ed aziende coinvolte nel progetto “ENFICA FC” (ENvironmentally Friendly Inter City Aircraft powered by Fuel Cells) della Comunità Europea. Il team è costituito dal Politecnico di Torino (IT) (Coordinatore, Progetto del velivolo modificato e prove e sperimentazione di volo), Skyleader (CZ) (realizzazione del velivolo), Intelligent Energy (UK) (progettazione e realizzazione delle Fuel Cells a idrogeno), APL (UK) (ha curato i serbatoi e l’alimentazione d’idrogeno ad alta pressione), Mavel Elettronica (IT) (progettazione e realizzazione di inverter e controllo elettronico della potenza), Università di Pisa (IT) (carcassa motore e prove iniziali in laboratorio del sistema elettrico).
In parallelo si sono svolti (in collaborazione con i partner Israel Aircraft Industry, Universitè Libre de Bruxelles ed Evektor-CZ) studi di tipo più teorico che, nella fase iniziale non avranno immediata applicazione pratica a causa dei limiti tecnologici attuali, ma che mirano a utilizzare concretamente in futuro i propulsori ad inquinamento zero per equipaggiare velivoli del segmento regional o intercity da 20-30 passeggeri”. A breve/medio termine sarà probabilmente possibile utilizzare a bordo di velivoli da trasporto dei sistemi ausiliari alimentati da celle a combustibile ad idrogeno. Tra i sistemi analizzati sembrano di possibile realizzazione l’APU (Auxiliary Power Unit), il sistema di retrazione dei carrelli di atterraggio, il sistema di condizionamento dell’aria, il sistema anti-ghiaccio delle superfici portanti, etc.
1.3. SESA: Velivolo non pilotato, di categoria Mini, ad energia solare:
Il gruppo di ricerca si occupa anche del progetto, della realizzazione e delle prove di volo di un piccolo UAV a propulsione solare per operazioni multipurpose. Il velivolo è stato realizzato, come parte dei progetti europei CAPECON e TANGO (Telecommunications Advanced Networks For GMES Operations), con lo scopo di eseguire diversi test di volo con un piccolo UAV al fine di dimostrare l’utilizzo di alcune tecnologie critiche e di alcune applicazioni. La capacità di carico utile è di circa 5-6 kg. Il modello è stato progettato e realizzato per volare con motore elettrico brushless alimentato da celle solari e da batterie LiPo, utilizzate principalmente nella fase di decollo. La struttura alare (7m di apertura alare) è stata realizzata in fibra di vetro e in fibra di carbonio; sul rivestimento sono stati integrati due array di celle solari flessibili ad alta efficienza (21%) la cui estensione complessiva è di 2 m2. Durante la fase di crociera il velivolo è propulso dall’energia prodotta da tali pannelli, ottenendo così un’autonomia di molto superiore a quella con motori a scoppio nei mesi in cui l’irraggiamento solare è più favorevole. Tutti gli altri elementi del velivolo sono stati ridisegnati e nuovamente realizzati per ottimizzare i pesi ed i volumi disponibili per il payload. L'UAV è stato anche utilizzato per una dimostrazione nel campo della individuazione di imbarcazioni non autorizzate, sempre nell’ambito del progetto TANGO. Durante la dimostrazione l'UAV è stato controllato manualmente nella fase di decollo e atterraggio, Una volta raggiunta la quota di crociera, si è passati a modalità autopilota fino a raggiungere la destinazione target. Le posizioni della nave sono state inviate alle autorità locali e la traiettoria riprogrammata in real time in modo da raggiungere la nave in maniera efficace. L'UAV è stato dotato anche di una comunicazione via satellite (Iridium) per eventuali missioni over–the-horizon. Il gruppo si occupa anche dello studio di dettaglio delle possibili configurazioni di payload (autopilota e sensoristica) e di comunicazione satellitare necessarie, delle problematiche connesse alla navigazione sicura con autopilota e problemi normativi per l’ottenimento del “permesso di volo”.
